轉速檢測原理 霍爾是一種基于霍爾效應的磁傳感器,常用型號有44E, 40AF等,引腳功能和作用相同,特性是可以檢測磁場及其變化,應用在各種與磁場有關的場合。使用在PG電機中時,霍爾安裝在內部獨立的電路板(霍爾電路板)上。
PG電機內部的轉子上裝有磁環,霍爾電路板上的霍爾與磁環在空間位置上相對應。PG電機轉子旋轉時帶動磁環轉動,霍爾將磁環的感應信號轉化為高電平或低電平的脈沖電壓由輸出腳輸出至主板CPU。轉子旋轉一圈.霍爾會輸出一個脈沖信號電壓或兒個脈沖信號電壓(廠家不同.脈沖信號數量不同),CPU根據脈沖電壓(即霜爾信號)計算出電機的實際轉速,并與目標轉速相比較,如有誤差則改變光禍晶閘管的導通角。從而改變PG電機的轉速,使實際轉速與目標轉速相對應。
工作原理
霍爾反饋電路原理圖見圖4-82,霍爾輸出引腳電壓與CPU引腳電壓的對應關系見表4-18,電路作用是向CPU提供PG電機的實際轉速。PG電機內部電路板通過CN4插座和室內機主板連接,共有3根引線,即供電直流12V,霍爾反饋輸出、地。
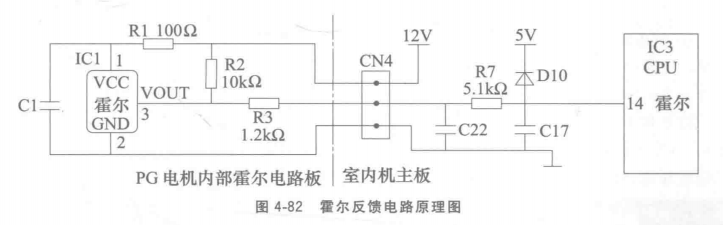

PG電機開始轉動時,內部電路板霍爾IC1的③腳輸出代表轉速的信號(即報爾信號),經電阻R3, R7送至CPU的?腳,CPU通過霍爾數量計算出PG電機的實際轉速,并與內部數據相比較。如轉速高于或低于正常值即有誤差,CPU?腳輸出信號通過改變晶閘管的導通角,改變PG電機線圈插座的供電電壓,從而改變PG電機的轉速,使實際轉速與目標轉速相同。
待機狀態下用手撥動貫流風扇時霍爾輸出引腳會輸出高電平或低電平,表中數值為直流12V電壓實側為12V時側得,如果直流12V上升至直流15V,則各個引腳的電壓也相應升高。